您好,欢迎访问开云网站!
您好,欢迎访问开云网站!


集团动态
联系开云
发布日期:2024-07-16 作者:开云
日前,哈尔滨工业年夜学深圳校区电机工程与主动化学院传授李兵、李曜团队在细小型机械人范畴获得新进展,相干功效颁发在《进步前辈科学》。
在微型机械人范畴,简化驱动情势和削减驱动器数目是一浩劫题,由于驱动器是限制机械人尺寸的要害身分。为了冲破这一瓶颈,李兵、李曜团队摸索了一种全新的驱动方式,其灵感来历在海豹的踱步跳动体例。这类方式可以或许使仅采取单一机电的刚体机械人在欠驱动前提下实现直行、弧行、转向等矫捷活动,为单机电驱动移念头器人的设计供给了全新思绪。
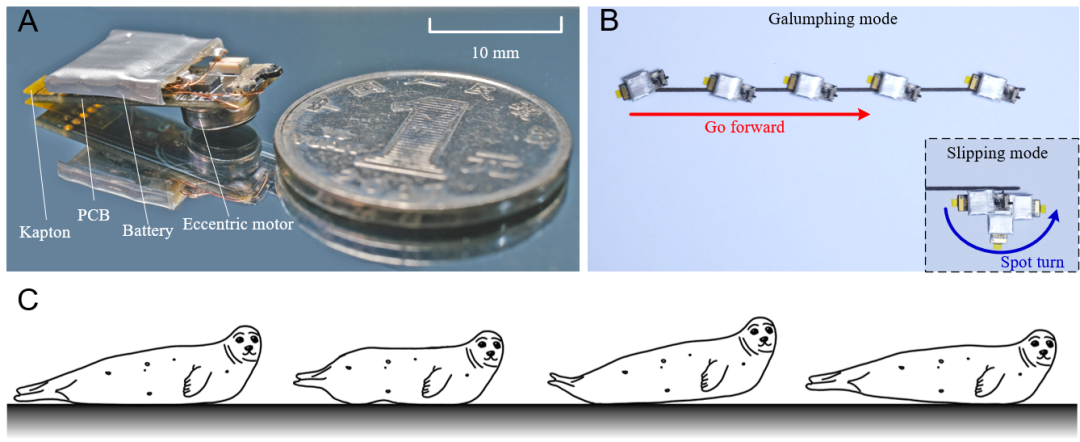
单机电驱动移念头器人 科研团队供图
现有的微型机械人年夜多依托集成多个履行器来确保矫捷性,但系统的复杂度限制了其进一步微型化。假如只采取一个履行器的机械人,固然布局简单,却在平面活动的矫捷性和精度方面存在严重不足。
为解决这一问题,研究团队引入了“偏疼力驱动的多标的目的活动传递(ERDMT)”的新手艺,该手艺仅操纵一个倾斜的偏疼机电和一个双腿布局就实现了矫捷的平面活动。基在ERDMT手艺的机械人仅需4个零件,即可以矫捷自若地实现复杂的活动轨迹。
基在此,该研究人员提出了一种基在偏疼扭转的“踱步跳跃”传动手艺。该手艺可以或许在特定转速规模内,使系统不变地实现微不雅标准(30至400微米)的踱步跳跃活动,并实现了单机电偏疼扭转驱动下的直交运动,为微型机械人平面活动驱动供给了一种更直接、更简练的路子。
另外,研究还发现,只需改变驱动电压来调理机电发生的偏疼转速,便可节制机械人构成分歧的宏不雅轨迹。
基在该驱动道理,团队研制出了一款名为GASR的微型爬行机械人,其重量仅为1.2克。得益在其不变、切确的活动机能,GASR即便在没有反馈节制的环境下,也可以或许矫捷地穿行在各类障碍物。
开云体育app相干论文信息:https://doi.org/10.1002/advs.202307738
版权声明:凡本网注明“来历:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来历和作者,且不得对内容作本色性改动;微信公家号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。